-
赛题背景
-
比赛环境
-
竞赛形式
-
成绩公布
-
无人驾驶和智能车技术深受深度学习和计算机视觉发展的影响,理论日趋成熟,正在向产业化落地迈进。
无人驾驶和智能车是一个综合了多个学科的应用领域,包含机器人学,自动化控制,机器学习,机器视觉,物联网,智能交通,车辆工程,移动通讯等技术。
为了让大学生提前了解并掌握产业界最常用、最实用的先进技术。教育部支持举办全国大学生智能汽车竞赛,这是国家级的A类赛事,获奖学员可以直接保送名校研究生。 大赛的目的是希望通过比赛能更好地培养大学生掌握机械电子、运动控制、传感器应用、机器学习、图像识别、SLAM地图构建、自主导航等人工智能领域先进技术。
但是由于无人车技术的综合性,能综合应用这些技术的教材却非常少。国内大多数关于无人车和无人驾驶的课程均为入门和科普类型,学员很难真正的完成无人驾驶相关技术的理论入门和编码实践训练,把人工智能技术和SLAM技术应用于真实的电动汽车上。
基于这种现状,我们开发了一套无人车的完整课程,旨在通过完整的课程,开源全套硬件和软件,使了无人驾驶所需关键传感器,IMU,激光雷达和深度相机,从零搭建一个电动结构的无人驾驶小车。 课程作者包含一线无人驾驶科研团队负责人,全国智能车竞赛的指导专家,丰富教学经验的资深讲师。
通过本课程,学员可以系统的学习,无人驾驶系统的感知,规划和运动控制算法,掌握ROS机器人操作系统编程,学习并实践多总传感器融合算法,使用机器学习、深度学习和强化学习等方法,把人工智能应用于实际的无人驾驶和竞赛中。
考虑到学习的难度曲线,课程零基础入门,采用python去编写上位机和ros进行运动控制,待学员对整体结构有一定的认识,能完整跑通完整slam算法和无人驾驶相关流程后。再去开始学习c++课程,讲解下位机和硬件,芯片控制,驱动开发相关的内容。 -
裁判员,赛道场地专用地图,自动计时系统,起跑线红外感应器,斑马线红外感应器,障碍物,赛场环境不确定性因素较多,例如地面纹理可能不平整,光照条件变化,地面打滑等。参赛队在编程时要考虑应对措施。
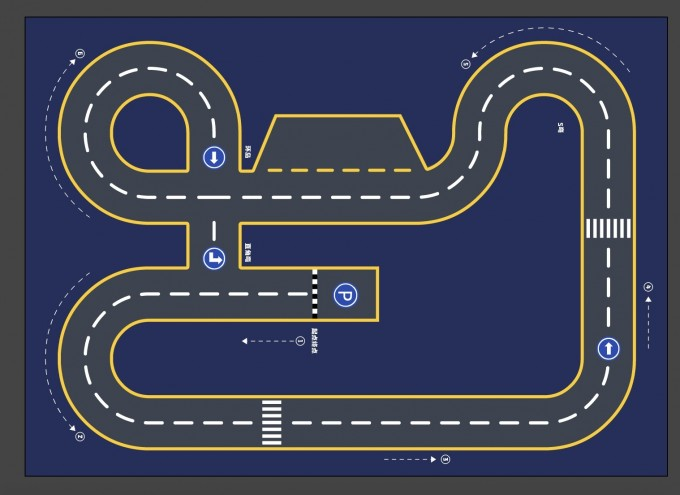
初赛可以自行组织,自行使用秒表计时, 决赛会使用专业红外感应计时系统。 比赛在专用赛道地图上进行,赛道整体完整尺寸为长3.5M,宽2.5M。赛道主要特征有:灰色路面、黄色边线、白色引导虚线,蓝白圆形标志,斑马线。
赛道完整地图如下:
-
本赛道正式竞赛分为两轮
初赛、全国总决赛两个阶段,在各阶段,参赛队伍须按照要求按时、合规地完成竞赛。
为了节省参赛队伍旅行和住宿费用;充分利用互联网,加大相互观摩和交流的机会;比赛通过云端直播,采用线上会场 + 线下总决赛的形式进行。
参赛高校可组织初赛,赛前需要提供比赛赛道现场的铺设照片;全国总决赛在线下举行(另行通知)。
比赛后需要提供以下资料:
1、现场全体队员合影
2、队员签字及裁判签字确认的成绩表照片(露出学校LOGO)
3、车辆检查表
4、比赛直播录像下载地址
初赛作品提交截止日期:11月24日前
提交邮箱:liucongcong@itcast.cn (备注学校+队名)
提交后,请联系组委会刘老师进行备注,微信:15704609928 - 竞赛结束后,由竞赛评测专家(由专家组遴选,组委会认定)进行评测,技术报告是参加全国总决赛的必要条件。 技术报告的质量也将会影响最终国赛奖项的排名,最终成绩将在大赛官网进行公示。公示期满并无异议后,公布获奖名单。
地址:北京市昌平区西三旗建材城西路金燕龙办公楼一层 邮编:100096 电话:010-82935150/60/70
江苏传智播客教育科技股份有限公司 版权所有 © 2006-2020 ALL Rights Reserved 苏ICP备16007882号-6